Operator Library: Hardware Platform
The BoardStatus operator has no inputs and no outputs. It provides read-only parameters to monitor the current board status during runtime.
This operator is mandatory in every design and is automatically instantiated by VisualApplets. The operator cannot be deleted.
| Available for Hardware Platforms |
|---|
| imaFlex 2 Dual 100 |
| imaFlex CXP-12 Penta |
| imaFlex CXP-12 Quad |
| mE5 marathon VCL |
| mE5 marathon VCLx |
| mE5 marathon VCX-QP |
| mE5 marathon VF2 |
| LightBridge 2 VCL |
| mE5 ironman VQ8-CXP6D |
| mE5 ironman VQ8-CXP6B |
| mE5 ironman VD8-PoCL |
![[Note]](../common/images/admon/note.png) |
可用参数 |
|---|---|
|
The BoardStatus operator provides a specific set of parameters for each hardware platform. The parameter descriptions below indicate which hardware platforms support which parameters. If no limitations are specified, the parameter is supported on all platforms. |
| FpgaDNAHigh (all imaFlex platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 不适用 | |||
| 范围 | [0; 2^32-1] | |||
|
This parameter FpgaDNAHigh provides the 32-bit MSB part of the 96-bit unique FPGA DNA as an integer value.
|
||||
| FpgaDNALow (all imaFlex platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 不适用 | |||
| 范围 | [0; 2^64-1] | |||
|
This parameter provides the 64-bit LSB part of the 96-bit unique FPGA DNA as an integer value.
|
||||
| FpgaTemperature (all platforms) | |
|---|---|
| 键入 | dynamic read parameter |
| 默认 | 不适用 |
| 范围 |
imaFlex 2 Dual 100, imaFlex CXP-12 Quad, and imaFlex CXP-12 Penta: [0; 200]; mE5 marathon, mE5 ironman and LightBridge VCL: [0; 512] |
|
The parameter FpgaTemperature provides the current FPGA temperature in degrees Celsius (°C). |
|
| FpgaVccInt (all platforms) | |
|---|---|
| 键入 | dynamic read parameter |
| 默认 | 不适用 |
| 范围 | [0; 5] |
|
The parameter FpgaVccInt provides the current VCC INT voltage of the FPGA in Volt. |
|
| FpgaVccAux (all platforms) | |
|---|---|
| 键入 | dynamic read parameter |
| 默认 | 不适用 |
| 范围 | [0; 5] |
|
The parameter FpgaVccAux provides the current VCC AUX voltage of the FPGA in Volt. |
|
| FpgaVccBram (imaFlex, mE5 marathon, and LightBridge VCL platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 不适用 | |||
| 范围 | [0; 5] | |||
|
The parameter provides the current VCC BRAM voltage of the FPGA in Volt.
|
||||
| ExtensionGpioBoardPresent (all imaFlex platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 不适用 | |||
| 范围 | {YES, NO} | |||
|
This parameter monitors the status of the GPIO Extension board:
|
||||
| PcieNegotiatedLinkWidth (all imaFlex platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 0 | |||
| 范围 |
imaFlex 2 Dual 100: {0, 1, 2, 4, 8, 16} imaFlex CXP-12 Quad, and imaFlex CXP-12 Penta: {0, 1, 2, 4, 8} |
|||
|
This parameter provides the amount of PCIe lanes actively used by the frame grabber and the host PC system.
|
||||
| PcieNegotiatedLinkSpeed (all imaFlex platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 8 | |||
| 范围 | {2.5, 5, 8} | |||
|
This parameter provides the PCIe speed in Gigabit per second.
|
||||
| PcieTrainedPayloadSize (imaFlex, mE5 marathon, and LightBridge VCL platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 128 | |||
| 范围 |
imaFlex 2 Dual 100, imaFlex CXP-12 Quad and imaFlex CXP-12 Penta: {128, 256, 512, 1024}; mE5 marathon, mE5 ironman, and LightBridge VCL: {128, 256, 512} |
|||
|
Size in bytes of the PCIe packets payload used for the data transmission between the framegrabber and the PCIe bridge.
|
||||
| PcieTrainedRequestSize (all imaFlex platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 128 | |||
| 范围 | {128, 256, 512, 1024, 2048, 4096} | |||
|
This parameter provides the size of the PCIe packet requests [in bytes] used for the data transmission between the frame grabber and the PCIe bridge.
|
||||
| FrontGpioPowerGood (imaFlex 2 Dual 100 platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | NO_POWER | |||
| 范围 | {GOOD, NO_POWER} | |||
|
This parameter indicates the power state of the front GPIO’s isolated 5V regulator, which supplies power to pin 9 (VCC 5V OUT) on the front GPIO connector.
|
||||
| ExtensionGpioPowerGood (imaFlex 2 Dual 100 platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | NO_POWER | |||
| 范围 | {GOOD, NO_POWER} | |||
|
This parameter indicates the power state of the extension GPIO board’s 3.3V power circuitry, which supplies power to connector pins 2 (+3.3 VDC), 4 (+3.3 VDC), 32 (VCCIO: +2.5 VDC / 3.3 VDC), and 34 (VCCIO: +2.5 VDC / 3.3 VDC).
|
||||
| HardwareRevision (imaFlex 2 Dual 100 platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 1 | |||
| 范围 | [0 : 7] | |||
|
This parameter reads the hardware revision of the board, which is hard-coded during the board production process.
|
||||
| FanSpeed (imaFlex 2 Dual 100 platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 0 | |||
| 范围 | [0 : 16383] | |||
|
This parameter measures the fan rotation speed in revolution per minute (RPM) units. The maximum RPM depends on the assembled fan and can vary between different hardware revisions and product customizations.
|
||||
| FiberPortPowerEnable0 / FiberPortPowerEnable1 (imaFlex 2 Dual 100 platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | NO | |||
| 范围 | {NO, YES} | |||
|
These parameters indicate the runtime software power settings for the fiber QSFP28 ports 0 and 1. The FiberPortPowerEnable0 parameter indicates the behavior for port 0, while the FiberPortPowerEnable1 parameter indicates the behavior for port 1.
|
||||
| FiberPortPowerGood0 / FiberPortPowerGood1 (imaFlex 2 Dual 100 platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | NO_POWER | |||
| 范围 | {GOOD, NO_POWER} | |||
|
These parameters indicate the power supply circuitry state of the dedicated QSFP28 ports 0 and 1. The FiberPortPowerGood0 parameter indicates the behavior for port 0, while the FiberPortPowerGood1 parameter indicates the behavior for port 1.
|
||||
| FiberPortModulePresent0 / FiberPortModulePresent1 (imaFlex 2 Dual 100 platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | NO | |||
| 范围 | {NO, YES} | |||
|
These parameters indicate the physical state of the module detection on QSFP28 ports 0 and 1. Detection works only when the port is powered. The FiberPortModulePresent0 parameter indicates the behavior for port 0, while the FiberPortModulePresent1 parameter indicates the behavior for port 1.
|
||||
| FiberPortInitReady0 / FiberPortInitReady1 (imaFlex 2 Dual 100 platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | NO | |||
| 范围 | {NO, YES} | |||
|
These parameters indicate the hardware initialization state for QSFP28 ports 0 and 1. The FiberPortInitReady0 parameter indicates the behavior for port 0, while the FiberPortInitReady1 parameter indicates the behavior for port 1.
|
||||
| FiberReceivedPacketCount0_0 / FiberReceivedPacketCount0_1 / FiberReceivedPacketCount0_2 / FiberReceivedPacketCount0_3 / FiberReceivedPacketCount1_0 / FiberReceivedPacketCount1_1 / FiberReceivedPacketCount1_2 / FiberReceivedPacketCount1_3 (imaFlex 2 Dual 100 platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 0 | |||
| 范围 | [0; 2^64-1] | |||
|
The parameter FiberReceivedPacketCountP_L indicates the number of received fiber packets over the QSFP28 port[P] lane[L]. Note: the fiber packet is a raw data block over fiber.
|
||||
| FiberReceivedPacketErrorCount0_0 / FiberReceivedPacketErrorCount0_1 / FiberReceivedPacketErrorCount0_2 / FiberReceivedPacketErrorCount0_3 / FiberReceivedPacketErrorCount1_0 / FiberReceivedPacketErrorCount1_1 / FiberReceivedPacketErrorCount1_2 / FiberReceivedPacketErrorCount1_3 (imaFlex 2 Dual 100 platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 0 | |||
| 范围 | [0; 2^48-1] | |||
|
The parameter FiberReceivedPacketErrorCountP_L indicates the number of received fiber packets over the QSFP28 port[P] lane[L], which are corrupted. Packet corruption can occur when QSFP28 module is damaged or fiber connector exceeds the allowed plug limits or due to electrical or optical damage of the fiber connection. This parameter together with the corresponding FiberReceivedPacketCountP_L can be used to judge the quality of the optical connection and to compute the connection error rate.
|
||||
| Reserved0_0 / Reserved0_1 / Reserved0_2 / Reserved0_3 / Reserved1_0 / Reserved1_1 / Reserved1_2 / Reserved1_3 (imaFlex 2 Dual 100 platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 0 | |||
| 范围 | [0; 2^48-1] | |||
|
These parameters are reserved for future implementations. Treat the indicated value as don’t care and don't evaluate it.
|
||||
| ExternalPowerGood (imaFlex CXP-12 Quad and imaFlex CXP-12 Penta platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 不适用 | |||
| 范围 | {GOOD, NO_POWER} | |||
|
|
||||
| FpgaDNA (mE5 marathon, LightBridge VCL, and ironman platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 不适用 | |||
| 范围 | [0; 2^57-1] | |||
|
The parameter FpgaDNA provides the 57-bit unique FPGA DNA as an integer value.
|
||||
| PcieCurrentLinkWidth (mE5 marathon and LightBridge VCL platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 0 | |||
| 范围 | [0; 4] | |||
|
The parameter provides the amount of PCIe lanes used by the framegrabber.
|
||||
| PcieCurrentLinkSpeed (mE5 marathon and LightBridge VCL platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 5 | |||
| 范围 | [2.5; 5] | |||
|
PCIe speed in Gigabit per second.
|
||||
| PcieLinkGen2Capable (mE5 marathon and LightBridge VCL platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | YES | |||
| 范围 | {YES, NO} | |||
|
Capability of the framegrabber to support PCIe generation 2 link.
|
||||
| PcieLinkPartnerGen2Capable (mE5 marathon and LightBridge VCL platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | YES | |||
| 范围 | {YES, NO} | |||
|
Capability of the bridge (device connected to the framegrabber through PCIe link) to support PCIe generation 2 link.
|
||||
| AlternativeBoardDetection (mE5 marathon and LightBridge VCL platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | OFF | |||
| 范围 | {OFF, ON} | |||
|
Parameter AlternativeBoardDetection informs which board detection algorithm is activated for board detection.
|
||||
| ExtensionConnectorPresent (mE5 marathon and LightBridge VCL platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | YES | |||
| 范围 | {YES, NO} | |||
|
The parameter indicates the existence of the extension GPIO board connected to GPIO slot connector (labeled as GPIO in the board documentation).
|
||||
| PoCLStatePortA (mE5 marathon VCLx, mE5 marathon VCL, and LightBridge 2 VCL platforms) | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 键入 | dynamic read parameter | ||||||||||||
| 默认 | Initialize | ||||||||||||
| 范围 | {PoCL_Disabled, Initialize, PoCL_Connection_Sense, PoCL_Wait_for_Connection, PoCL_Camera_Detected, PoCL_Camera_Clock_Detected, CL_Wait_for_Connection, CL_Camera_Detected, CL_Camera_Clock_Detected} | ||||||||||||
|
The parameter allows to read the current state of the Power over Camera Link (PoCL) state machine on the Port A connector.
PoCL_Disabled: If PoCL is not enabled for the board, this state will be displayed during runtime.
If PoCL has been enabled in microDiagnostics (or the applet has been built with VisualApplets 3.0.4 or prior), the individual states of the Power over Camera Link (PoCL) state machine indicate the following: Initialize: This state has a duration of 100 ms. During this period, PoCL detection as well as PoCL operation is off. This way, the board establishes a defined initial state with no voltage applied. PoCL_Connection_Sense: This state has a duration of 600 ms. It follows directly of state Initialize. During this state, the controller finds out if the connected camera is PoCL-capable or not.
(The controller applies a test current and waits for 600 ms. Then, the voltage drop is measured. There are two thresholds: Is the measured value between both thresholds, the PoCL state machine switches to state PoCL_Wait_for_Connection. Is the measured value lower than both thresholds, the PoCL state machine switches to state CL_Wait_for_Connection. Is the measured value higher than both thresholds, the connection is either broken or disturbed. In this case, the PoCL state machine switches to state Initialize and starts again.) PoCL_Wait_for_Connection: This state has a duration of 1.8 seconds. It follows directly of state PoCL_Connection_Sense in case a a power-over capable camera is detected. During this time, the controller waits and checks if the information about the availability of a power-over capable camera remains stable:
To ensure that a PoCL camera was not detected erroneously (due to disturbances), during state PoCL_Wait_for_Connection the controller checks if the measured voltage drop remains stable between the two thresholds values during the 1.8 seconds. If the measured voltage remains stable, a PoCL-capable camera is assumed, the state machine switches to state PoCL_Camera_Detected, and the camera is powered. Rises the measured voltage higher the upper threshold value, or falls it below the lower threshold value, there is a disturbance. The state machine switches to state Initialize and starts again. PoCL_Camera_Detected: This state has a duration of up to 4 seconds. The camera is powered. The controller waits for the camera to get ready and for receiving a clock signal from the camera.
PoCL_Camera_Clock_Detected: The camera is ready for operation.
CL_Wait_for_Connection: This state has a duration of 100ms. It follows directly of state PoCL_Connection_Sense in case a CL camera without PoCL support is detected. The test current is switched off. The system waits for 100ms to allow the charges to drain slowly. After this timespan, the state machine switches to state CL_Camera_Detected, and ground (GND) is connected. CL_Camera_Detected: This state has a duration of up to 4 seconds. The connected camera has been identified as not PoCL-capable. The controller waits for the camera to get ready and for receiving a clock signal from the camera.
CL_Camera_Clock_Detected: The camera is ready for operation.
If PoCL support is enabled, the PoCL state machine decision flow runs as follows: 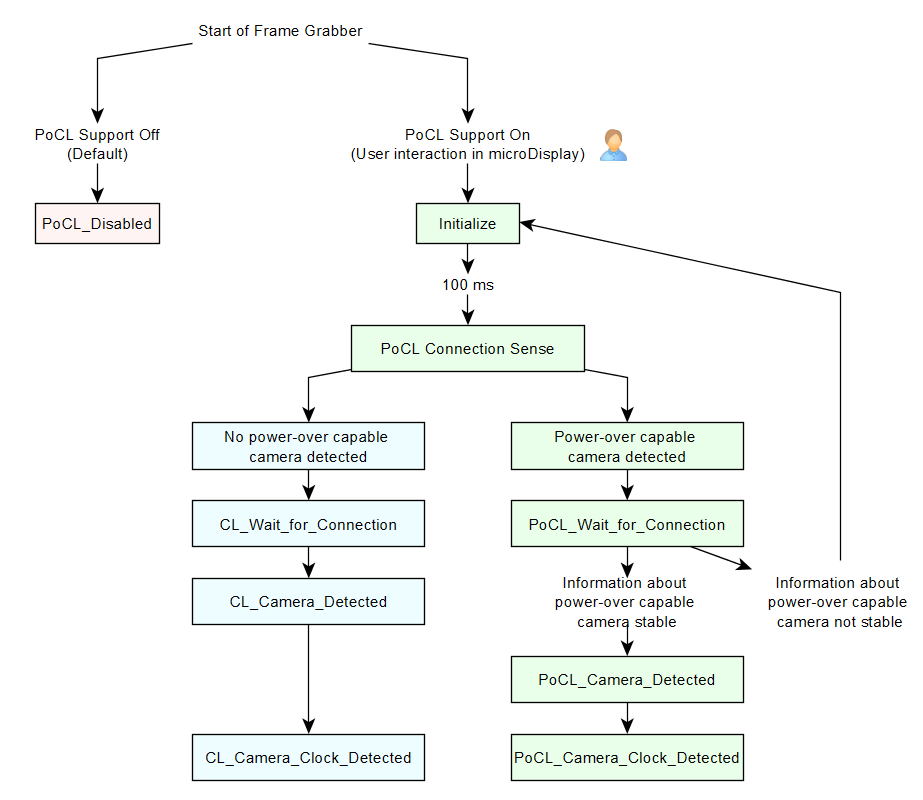
|
|||||||||||||
![[Important]](../common/images/admon/important.png)
![[Tip]](../common/images/admon/tip.png)
| PoCLStatePortB (mE5 marathon VCLx, mE5 marathon VCL, and LightBridge 2 VCL platforms) | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 键入 | dynamic read parameter | ||||||||||||
| 默认 | Initialize | ||||||||||||
| 范围 | {PoCL_Disabled, Initialize, PoCL_Connection_Sense, PoCL_Wait_for_Connection, PoCL_Camera_Detected, PoCL_Camera_Clock_Detected, CL_Wait_for_Connection, CL_Camera_Detected, CL_Camera_Clock_Detected} | ||||||||||||
|
The parameter allows to read the current state of the Power over Camera Link (PoCL) state machine on the Port B connector.
PoCL_Disabled: If PoCL is not enabled for the board, this state will be displayed during runtime.
If PoCL has been enabled in microDiagnostics (or the applet has been built with VisualApplets 3.0.4 or prior), the individual states of the Power over Camera Link (PoCL) state machine indicate the following: Initialize: This state has a duration of 100 ms. During this period, PoCL detection as well as PoCL operation is off. This way, the board establishes a defined initial state with no voltage applied. PoCL_Connection_Sense: This state has a duration of 600 ms. It follows directly of state Initialize. During this state, the controller finds out if the connected camera is PoCL-capable or not.
(The controller applies a test current and waits for 600 ms. Then, the voltage drop is measured. There are two thresholds: Is the measured value between both thresholds, the PoCL state machine switches to state PoCL_Wait_for_Connection. Is the measured value lower than both thresholds, the PoCL state machine switches to state CL_Wait_for_Connection. Is the measured value higher than both thresholds, the connection is either broken or disturbed. In this case, the PoCL state machine switches to state Initialize and starts again.) PoCL_Wait_for_Connection: This state has a duration of 1.8 seconds. It follows directly of state PoCL_Connection_Sense in case a a power-over capable camera is detected. During this time, the controller waits and checks if the information about the availability of a power-over capable camera remains stable:
To ensure that a PoCL camera was not detected erroneously (due to disturbances), during state PoCL_Wait_for_Connection the controller checks if the measured voltage drop remains stable between the two thresholds values during the 1.8 seconds. If the measured voltage remains stable, a PoCL-capable camera is assumed, the state machine switches to state PoCL_Camera_Detected, and the camera is powered. Rises the measured voltage higher the upper threshold value, or falls it below the lower threshold value, there is a disturbance. The state machine switches to state Initialize and starts again. PoCL_Camera_Detected: This state has a duration of up to 4 seconds. The camera is powered. The controller waits for the camera to get ready and for receiving a clock signal from the camera.
PoCL_Camera_Clock_Detected: The camera is ready for operation.
CL_Wait_for_Connection: This state has a duration of 100ms. It follows directly of state PoCL_Connection_Sense in case a CL camera without PoCL support is detected. The test current is switched off. The system waits for 100ms to allow the charges to drain slowly. After this timespan, the state machine switches to state CL_Camera_Detected, and ground (GND) is connected. CL_Camera_Detected: This state has a duration of up to 4 seconds. The connected camera has been identified as not PoCL-capable. The controller waits for the camera to get ready and for receiving a clock signal from the camera.
CL_Camera_Clock_Detected: The camera is ready for operation.
If PoCL support is enabled, the PoCL state machine decision flow runs as follows:
|
|||||||||||||
| BoardPower (ironman platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 不适用 | |||
| 范围 | {0; 100} | |||
|
The parameter BoardPower measures the board total power consumption in Watt.
|
||||
| CxpChipTemperature (mE5 ironman VQ8-CXP6D and mE5 ironman VQ8-CXP6B platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 不适用 | |||
| 范围 | {0; 512} | |||
|
The parameter CxpChipTemperature measures the temperature near the CXP front-end chips in degrees Celsius (°C).
|
||||
| RamChipTemperature (mE5 ironman VQ8-CXP6D and mE5 ironman VQ8-CXP6B platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 不适用 | |||
| 范围 | {0; 512} | |||
|
The parameter RamChipTemperature measures the temperature near the RAM chips in degrees Celsius (°C).
|
||||
| CxpPowerRegulatorTemperature (mE5 ironman VQ8-CXP6D and mE5 ironman VQ8-CXP6B platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 不适用 | |||
| 范围 | {0; 512} | |||
|
The parameter CxpPowerRegulatorTemperature measures the temperature near the CXP power chips in degrees Celsius (°C).
|
||||
| PowerRegulatorTemperature (mE5 ironman VQ8-CXP6D and mE5 ironman VQ8-CXP6B platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 不适用 | |||
| 范围 | {0; 512} | |||
|
The parameter PowerRegulatorTemperature measures the temperature near the board power regulator chips in degrees Celsius (°C).
|
||||
| ChannelCurrent (mE5 ironman VQ8-CXP6D and mE5 ironman VQ8-CXP6B platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 不适用 | |||
| 范围 | {0; 30} | |||
|
The parameter ChannelCurrent measures the CXP power chip current in Ampere of each channel available on the board. (4 channels are present on all SiSo CXP grabbers.)
|
||||
| ChannelVoltage (mE5 ironman VQ8-CXP6D and mE5 ironman VQ8-CXP6B platforms) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 不适用 | |||
| 范围 | {0; 30} | |||
|
The parameter ChannelVoltage measures the CXP power chip voltage in Volt of each channel available on the board. (4 channels are present on all SiSo CXP grabbers.)
|
||||
| PoCXPStatePort_0 (mE5 marathon VCX-QP platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | BOOTING | |||
| 范围 | {BOOTING, NOCABLE, NOPOCXP, POCXPOK, MIN_CURR, MAX_CURR, LOW_VOLT, OVER_VOLT, ADC_Chip_Error} | |||
|
The parameter represents the current state of the power over CoaXPress state machine on the frame grabber's port[0] connector.
|
||||
| PoCXPCurrentPort_0 (mE5 marathon VCX-QP platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 0 | |||
| 范围 | [-1000.0 mA; +1000.0 mA] | |||
|
The parameter measures the currently flowing current on port[0] (in mA).
|
||||
| PoCXPVoltagePort_0 (mE5 marathon VCX-QP platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 24 V | |||
| 范围 | [0.0 V; 30.0 V] | |||
|
The parameter measures the voltage of the CXP power regulator of port[0] (in V). When the port is not connected, the measured voltage will be 24 V.
|
||||
| PoCXPStatePort_1 (mE5 marathon VCX-QP platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | BOOTING | |||
| 范围 | {BOOTING, NOCABLE, NOPOCXP, POCXPOK, MIN_CURR, MAX_CURR, LOW_VOLT, OVER_VOLT, ADC_Chip_Error} | |||
|
The parameter represents the current state of the power over CoaXPress state machine on the frame grabber's port[1] connector.
|
||||
| PoCXPCurrentPort_1 (mE5 marathon VCX-QP platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 0 | |||
| 范围 | [-1000.0 mA; +1000.0 mA] | |||
|
The parameter measures the currently flowing current on port[1] (in mA).
|
||||
| PoCXPVoltagePort_1 (mE5 marathon VCX-QP platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 24 V | |||
| 范围 | [0.0 V; 30.0 V] | |||
|
The parameter measures the voltage of the CXP power regulator of port[1] (in V). When the port is not connected, the measured voltage will be 24 V.
|
||||
| PoCXPStatePort_2 (mE5 marathon VCX-QP platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | BOOTING | |||
| 范围 | {BOOTING, NOCABLE, NOPOCXP, POCXPOK, MIN_CURR, MAX_CURR, LOW_VOLT, OVER_VOLT, ADC_Chip_Error} | |||
|
The parameter represents the current state of the power over CoaXPress state machine on the frame grabber's port[2] connector.
|
||||
| PoCXPCurrentPort_2 (mE5 marathon VCX-QP platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 0 | |||
| 范围 | [-1000.0 mA; +1000.0 mA] | |||
|
The parameter measures the currently flowing current on port[2] (in mA).
|
||||
| PoCXPVoltagePort_2 (mE5 marathon VCX-QP platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 24 V | |||
| 范围 | [0.0 V; 30.0 V] | |||
|
The parameter measures the voltage of the CXP power regulator of port[2] (in V). When the port is not connected, the measured voltage will be 24 V.
|
||||
| PoCXPStatePort_3 (mE5 marathon VCX-QP platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | BOOTING | |||
| 范围 | {BOOTING, NOCABLE, NOPOCXP, POCXPOK, MIN_CURR, MAX_CURR, LOW_VOLT, OVER_VOLT, ADC_Chip_Error} | |||
|
The parameter represents the current state of the power over CoaXPress state machine on the frame grabber's port[3] connector.
|
||||
| PoCXPCurrentPort_3 (mE5 marathon VCX-QP platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 0 | |||
| 范围 | [-1000.0 mA; +1000.0 mA] | |||
|
The parameter measures the currently flowing current on port[3] (in mA).
|
||||
| PoCXPVoltagePort_3 (mE5 marathon VCX-QP platform) | ||||
|---|---|---|---|---|
| 键入 | dynamic read parameter | |||
| 默认 | 24 V | |||
| 范围 | [0.0 V; 30.0 V] | |||
|
The parameter measures the voltage of the CXP power regulator of port[3] (in V). When the port is not connected, the measured voltage will be 24V.
|
||||
The use of operator BoardStatus is shown in the following examples:
-
Tutorial - Basic Acquisition
-
Tutorial - Basic Acquisition
-
Tutorial - Basic Acquisition
-
Tutorial - Basic Acquisition
